





CATEC Automation chúng tôi chuyên nhận sửa servo Fuji báo lỗi nhanh chóng trong vòng 24 giờ với đội ngũ nhân viên kỹ thuật có kinh nghiệm lâu năm trong lĩnh vực tự động hóa. Chúng tôi cam kết sẽ đem lại cho quý khách một trải nghiệm tốt về mọi dịch vụ tại công ty chúng tôi. Giá cả phải chăng khi và bảo hành tận tình khi sửa chữa Servo và nhận lại thiết bị trong thời gian nhanh nhất.
Bên cạnh đó chúng tôi luôn có đội ngũ kỹ thuật sẽ báo cáo lại với khách hàng về mức độ hư hỏng của thiết bị. CATEC chúng tôi cam kết luôn có các linh phụ kiện chính hãng 100% tại kho với số lượng lớn, phục vụ quý khánh hàng nhanh chóng. Chúng tôi cam kết đối với các dịch vụ sửa chữa của chúng tôi không quá 30% so với sản phẩm mới cùng mã hàng. Bảo hành sản phẩm khắc phục lỗi servo Fuji trong vòng 3 tháng.

Servo Fuji báo lỗi
Bảng mã lỗi Servo Fuji, các dòng khác vui lòng liên hệ trực tiếp công ty để được tư vấn:
- Lỗi AL001 : Cảnh báo quá tải dòng điện trên mạch nguồn cấp cho động cơ.
- Lỗi AL002 : Cảnh báo quá áp mạch nguồn chính.
- Lỗi AL003: Cảnh báo điện áp thấp.
- Lỗi AL004 : Servo Motor có sự cố hoặc sai công suất.
- Lỗi AL005 : Lỗi chức năng hãm tái sinh.
- Lỗi AL006: Servo Motor và Servo Drive quá tải.
- Lỗi AL007: Servo Motor chạy quá tốc độ bình thường.
- Lỗi AL008: Lệnh điều khiển xung vào có vấn đề.
- Lỗi AL009: Sai lệch vị trí quá mức cho phép.
- Lỗi AL010: Không sử dụng.
- Lỗi AL011: Lỗi phản hồi Encoder.
- Lỗi AL012: Giá trị cài đặt vượt quá giá trị cho phép.
- Lỗi AL013: Tín hiệu dừng khẩn.
- Lỗi AL014: Giới hạn chiều quay ngược.
- Lỗi AL015: Giới hạn chiều quay thuận.
- Lỗi AL016: Nhiệt độ phần công suất IGBT quá cao.
- Lỗi AL017: Bộ nhớ EE-PROM lỗi.
- Lỗi AL018: Tín hiệu tần số ngõ ra encoder cao hơn định mức.
- Lỗi AL019: Lỗi cổng truyền thông RS232/RS485.
- Lỗi AL020: Lỗi tín hiệu truyền thông Time out.
- Lỗi AL021: Không sử dụng.
- Lỗi AL022: Mất phase điện áp ngõ vào.
- Lỗi AL023: Tín hiệu cảnh báo quá tải trước khi xuất hiện lỗi AL006.
- Lỗi AL024: Lỗi tín hiệu encoder U, V, W khi khởi tạo.
- Lỗi AL025: Bộ nhớ bên trong encoder bị lỗi.
- Lỗi AL026: Dữ liệu của encoder bị lỗi.
- Lỗi AL027: Lỗi động cơ do giá trị cài đặt encoder lỗi.
- Lỗi AL028: Lỗi động cơ do tín hiệu encoder U, V, W lỗi.
- Lỗi AL029: Lỗi động cơ do địa chỉ bên trong encoder bị lỗi.
- Lỗi AL030: Cảnh bảo lỗi động cơ, lỗi do người dùng tự cài % và thời gian xảy ra.
- Lỗi AL031: Dây kết nối các phase U,V,W, GND lỗi.
- Lỗi AL035: Lỗi motor do nhiệt độ động cơ vượt quá nhiệt độ cho phép.
- Lỗi AL048: Lỗi tín hiệu encoder output vượt quá dung sai của phần cứng.
- Lỗi AL067: Cảnh bảo nhiệt độ động cơ quá cao.
- Lỗi AL099: Lỗi EE-PROM không được đặt lại sau khi phiên bản phần mềm được nâng cấp
Hiển thị cảnh báo lỗi không nhận Encoder
Hiển thị lỗi cảnh báo quá tải dòng điện trên mạch nguồn cấp cho động cơ.
Nguyên nhân lỗi servo Fuji
- Sửa Servo Fuji chưa set đúng thông số.
- Sửa Servo Fuji cáp encoder, hư cáp I/O.
- Sửa Servo Fuji bo điều khiển hư hỏng.
- Sửa Servo Fuji bị cháy.
- Sửa Servo Fuji nổ.
- Sửa Servo Fuji lỗi nhảy CB, MCCB cấp nguồn cho Drive.
- Sửa Servo Fuji lỗi bàn phím xuất hiện toàn số 8888.
- Sửa Servo Fuji lỗi không nhấn được.
- Sửa Servo Fuji lỗi quá tải OL OverLoad trên Driver.
- Sửa Servo Fuji lỗi không thể cài đặt cho Drive
- Sửa Servo Fuji lỗi quá dòng OC OverCurrent trên Driver.
- Sửa Servo Fuji lỗi mất nguồn, không lên nguồn.
- Sửa Servo Fuji bo lái, góc kích bị hư hỏng.
- Sửa Servo Fuji hỏng IGBT.
- Sửa Servo Fuji bạc đạn Motor bị hư hỏng
- Sửa Servo Fuji Cuộn dây Motor bị hư hỏng.
- Sửa Servo Fuji Encoder Motor bị hư hỏng.
- Sửa Servo Fuji chỉnh lưu bị hư hỏng.
- Sửa Servo Fuji board error dùng trong dây truyền công nghiệp.
- Sửa Servo Fuji báo lỗi giật động cơ lệch pha đầu ra cho máy ép nhựa.
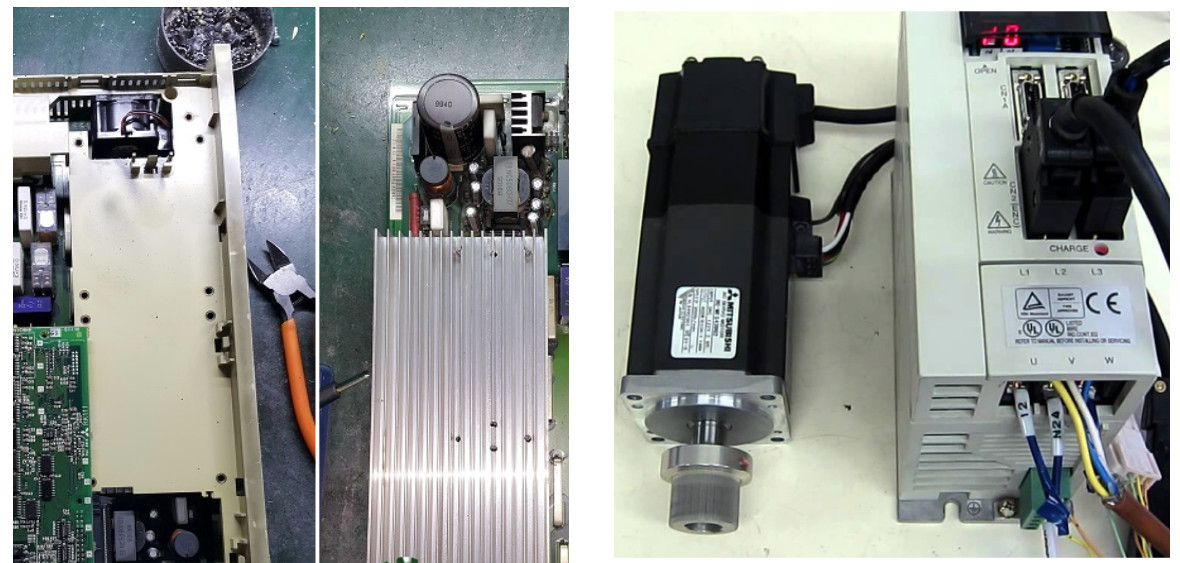
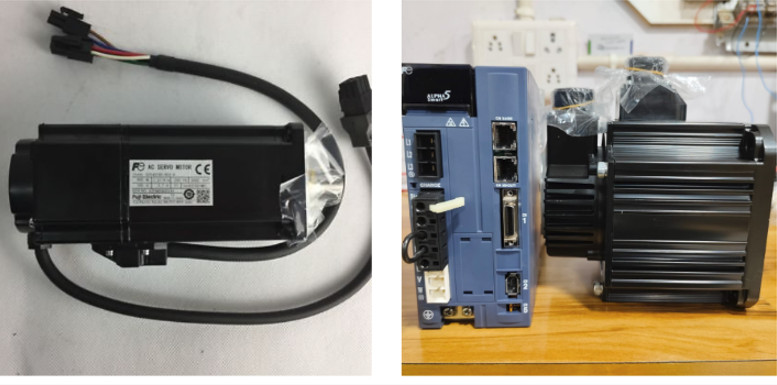
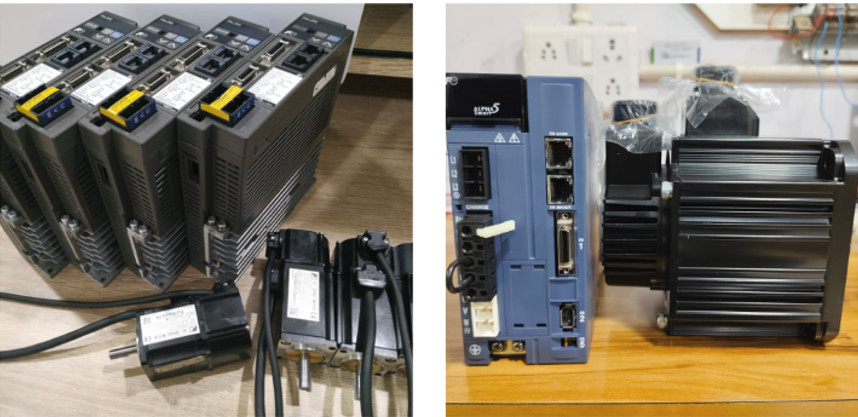
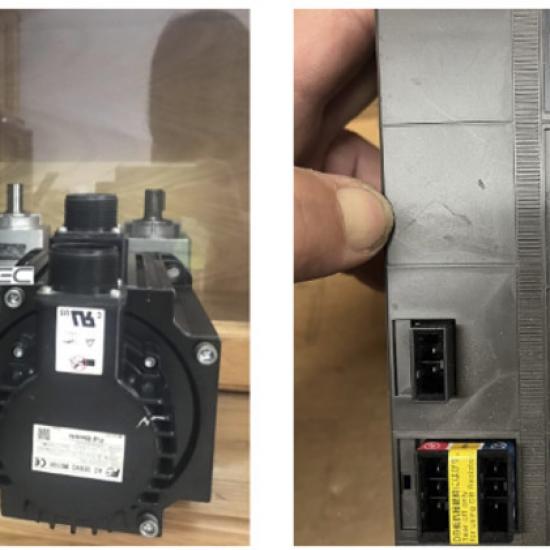
Dưới đây là một số hình ảnh thiết bị đang trong quá trình sửa chữa tại CATEC

Mã lỗi servo Fuji
- AL.01 – Overcurrent: Quá dòng xảy ra do tải quá lớn, sự cố với động cơ hoặc cáp kết nối. Kiểm tra tải, cáp nối và thay thế nếu cần.
- AL.02 – Overvoltage: Điện áp nguồn cung cấp cao hơn mức cho phép. Kiểm tra nguồn cấp và đảm bảo không vượt quá điện áp định mức của servo.
- AL.03 – Undervoltage: Điện áp thấp hơn mức yêu cầu, thường do nguồn không ổn định. Kiểm tra lại nguồn điện hoặc hệ thống dây dẫn.
- AL.04 – Motor Overheat: Động cơ quá nóng do tải quá lớn hoặc môi trường nhiệt độ cao. Giảm tải hoặc cải thiện thông gió cho hệ thống.
- AL.05 – Encoder Error: Lỗi encoder, có thể do hỏng hóc hoặc kết nối kém. Kiểm tra và vệ sinh encoder, thay thế nếu cần.
- AL.06 – Overload: Quá tải động cơ kéo dài. Kiểm tra tải trọng và giảm tải nếu vượt quá công suất động cơ.
- AL.09 – Position Error Excessive: Sai lệch vị trí quá mức. Điều này có thể xảy ra do tín hiệu điều khiển không chính xác hoặc lỗi hệ thống servo. Kiểm tra tín hiệu và hệ thống điều khiển.
- AL.12 – Regenerative Error: Quá trình tái sinh năng lượng gặp vấn đề, thường do tải trọng thay đổi đột ngột. Kiểm tra tải và xem xét lắp thêm điện trở tái sinh nếu cần.
- AL.13 – Overspeed: Tốc độ động cơ vượt quá giới hạn cho phép. Kiểm tra tín hiệu điều khiển và giảm tốc độ nếu cần thiết.
- AL.14 – Abnormal Encoder: Encoder hoạt động bất thường, có thể do lỗi kết nối hoặc hư hỏng. Kiểm tra cáp nối encoder và vệ sinh các tiếp điểm, thay thế nếu cần.
- AL.19 – Communication Error: Lỗi giao tiếp giữa servo và bộ điều khiển, thường xảy ra do kết nối kém hoặc nhiễu. Kiểm tra cáp mạng, đảm bảo các thiết bị được kết nối chắc chắn và ổn định.
- AL.20 – Parameter Error: Lỗi do tham số cài đặt sai hoặc bị mất. Xem lại và thiết lập lại các thông số, đảm bảo giá trị nằm trong giới hạn cho phép.
- AL.29 – Brake Error: Lỗi phanh, có thể do hỏng phanh hoặc kết nối phanh không chính xác. Kiểm tra phanh, đặc biệt khi động cơ không giữ được vị trí hoặc bị trượt.
- AL.31 – CPU Error: Lỗi CPU của bộ điều khiển servo. Khởi động lại hệ thống và kiểm tra lại nếu lỗi tiếp tục xảy ra; có thể cần liên hệ với nhà sản xuất.
- AL.33 – External Emergency Stop: Lệnh dừng khẩn cấp được kích hoạt từ bên ngoài. Kiểm tra tín hiệu dừng khẩn cấp và chắc chắn hệ thống không bị chạm mạch.
- AL.41 – Over Temperature: Quá nhiệt của bộ điều khiển servo. Kiểm tra hệ thống làm mát hoặc quạt tản nhiệt của servo.
- AL.70 – Battery Low: Pin nuôi của servo yếu, thường là pin của bộ mã hóa encoder. Thay pin để tránh mất dữ liệu hoặc lỗi vị trí.
- AL.71 – Absolute Encoder Error: Lỗi bộ mã hóa tuyệt đối, có thể do mất dữ liệu vị trí. Kiểm tra encoder và cài đặt lại nếu cần.
- AL.80 – Motor Lock Error: Lỗi khóa động cơ, thường xảy ra khi động cơ không thể xoay theo yêu cầu. Kiểm tra xem có chướng ngại vật nào không hoặc xem tải có quá nặng không.
- AL.95 – Software Limit Error: Lỗi do vượt quá giới hạn phần mềm cài đặt trong hệ thống điều khiển. Kiểm tra lại các giới hạn cài đặt và điều chỉnh lại trong bộ điều khiển.
- AL.99 – Memory Error: Lỗi bộ nhớ trong servo. Thường yêu cầu liên hệ nhà cung cấp để sửa chữa hoặc thay thế.
- AL.100 – Inertia Mismatch: Sai lệch về quán tính giữa động cơ và tải, thường xảy ra khi tải quá nặng hoặc động cơ không đáp ứng được tải. Kiểm tra cấu hình động cơ và giảm tải nếu cần thiết.
- AL.101 – Torque Limit Error: Lỗi giới hạn mô-men xoắn, khi động cơ vượt quá mô-men xoắn cài đặt. Kiểm tra và điều chỉnh lại giới hạn mô-men xoắn trong thông số cài đặt.
- AL.120 – Current Offset Error: Lỗi lệch dòng điện, có thể do cảm biến dòng hoặc mạch điện trong bộ điều khiển gặp vấn đề. Kiểm tra lại hệ thống điều khiển và thay thế cảm biến dòng nếu cần.
- AL.130 – Resolver Error: Lỗi resolver, thường xảy ra khi thiết bị này hỏng hoặc không đọc đúng vị trí của động cơ. Kiểm tra kết nối của resolver và vệ sinh đầu tiếp xúc, thay thế nếu bị hư hỏng.
- AL.150 – Encoder Communication Error: Lỗi giao tiếp với encoder, có thể do nhiễu hoặc đứt kết nối. Kiểm tra cáp nối, đặc biệt là các cổng giao tiếp của encoder và servo.
- AL.160 – Position Overflow: Lỗi tràn vị trí khi động cơ vượt quá biên giới hạn của trục. Xem lại cài đặt giới hạn vị trí và điều chỉnh để ngăn ngừa vượt quá giới hạn.
- AL.170 – Speed Loop Error: Lỗi vòng điều khiển tốc độ, có thể do tín hiệu điều khiển không ổn định hoặc cài đặt tham số PID không phù hợp. Kiểm tra tham số điều khiển và tối ưu hóa lại nếu cần thiết.