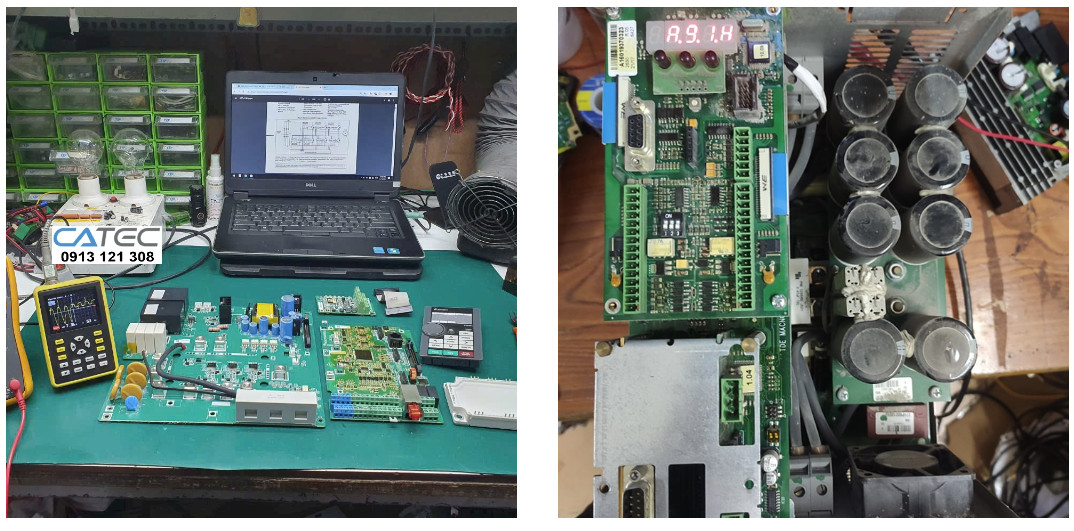




Công Ty TNHH Kỹ Thuật Công Nghệ Catec – Chuyên Cung cấp Dịch vụ Chuyên Sửa chữa Servo Việt Nam – Phạm vi Phục vụ Toàn Quốc – Sửa chữa nhanh chóng, tận nơi tại Bình Dương, Đồng Nai, Tp.Hồ Chí Minh, Long An, Tây Ninh, Bình Phước, Bà rịa Vũng tàu, Củ Chi, Hóc Môn, Thủ Đức,…Sửa chữa nhanh chóng tận nơi, Sửa kỹ lưỡng, triệt để hết lỗi, Bảo hành uy tín dài lâu, Hỗ trợ kỹ thuật 24/7
Chúng tôi chuyên cung cấp dịch vụ sửa servo các hãng: Servo Yaskawa, Servo Delta, Servo Panasonic, Servo Sanyo Denki, Servo Mitsubishi, ServoTeco, Servo Shihlin, Servo Siemens, Servo Allen bradley, Servo Omron, Servo Fuji, Servo Lenze, Servo Fanuc, Servo Estun, Servo HCFA, Servo Beckhoff, Servo INVT, Servo LS...
Các lỗi hay gặp của servo mà chúng tôi đã sửa thành công
- Sửa bộ điều khiển Driver servo lỗi hư IGBT, chỉnh lưu, hư board điều khiển, hư board công suất (board lái), lỗi góc kích, diode, tụ điện…báo lỗi quá tải OL – Overload do motor quá tải hoặc hệ cơ bị kẹt.
- Sửa bộ điều khiển Driver Servo lỗi mất nguồn, không lên nguồn – do hư tụ, mạch nguồn, cầu chì, board nguồn, lỗi lên toàn số 8888 hoặc không hiển thị đúng thông số trên màn hình.
- Sửa động cơ Servo bị bể thắng, kẹt thắng, quá tải, sửa motor servo hư encoder, hư bạc đạn, hư cuộn dây, kẹt rotor, gạy cốt, cạ cốt, rung cốt...
- Sửa motor Servo lỗi do nhiệt độ động cơ vượt quá nhiệt độ cho phép, tín hiệu encoder output vượt quá dung sai của phần cứng, gây kêu, rung hoặc bó trục
Với linh kiện được Stock kho dồi dào do vậy Quý khách hàng luôn yên tâm thiết bị sẽ được sửa chữa nhanh chóng nhất tránh gián đoạn sản xuất. Công Ty Catec chúng tôi là đại lý chuyên cung cấp linh kiện servo chính hãng, Quý khách hàng luôn yên tâm về chất lượng, giá cả, và bảo hành. Servo trong quá trình sửa chữa được thay nguyên Board mạch tránh tình trạng sửa từng linh kiện sẽ thay đổi thông số kỹ thuật, và ảnh hưởng chất lượng Board mạch, bảo hành 6 tháng sau khi Sửa chữa

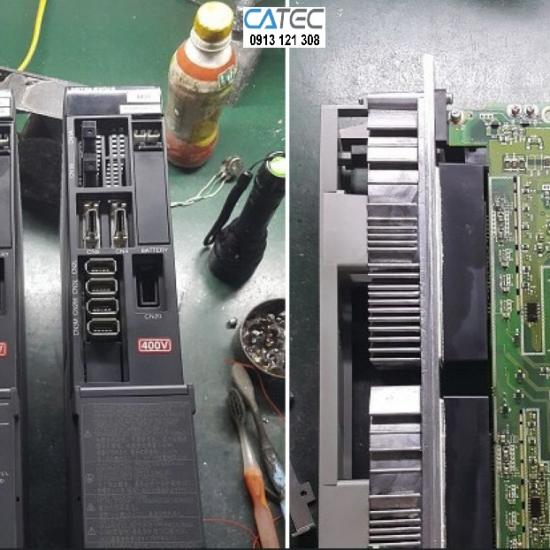
Chuyên sửa chữa AC servo Mitsubishi các lỗi như
1. Sửa servo Mitsubishi Lỗi nổ công suất ngõ ra trên Servo Driver
2. Lỗi quá tải , Lỗi quá Áp , Lỗi quá dòng
3. Sửa servo Fanuc Lỗi quá nhiệt
4. Lỗi giới hạn dòng điện
5. Sửa servo Mitsubishi Lỗi Over Speed
6. Sửa servo Mitsubishi Hư encoder , Bể bạc đạn, kẹt Rotor Drive báo lỗi quá dòng/ quá tải
7. Sửa servo Mitsubishi chạm vỏ: 1/3 pha cuộn dây motor chạm vỏ
8.Sửa servo Mitsubishi Lỗi mất kết nối Drive servo và Motor Servo
Các bước cơ bản kiểm tra servo Mitsubishi lỗi
1. Kiểm tra cáp Động lực và cáp Encoder xem có đứt hoặc chạm không?
2. Kiểm tra nguồn cấp 24V cho Drive
3. Kiểm tra thắng Motor, khi cấp nguồn 24V thắng có mở không (với tình huống motor có thắng)
4. Đo và kiểm tra các Khởi động từ, MCCB cấp nguồn cho Servo
5. Đo và kiểm tra 3 pha motor xem có bị chạm vỏ không?
6. Kiểm tra các chân tiếp xúc trên Driver và jack phía motor
7. Đo và kiểm tra ngõ ra Drive xem có bị chạm không
Các lỗi động cơ motor servo phổ biến nhất và cách xử lý
Sữa chữa servo Mitsubishi Lỗi encoder: Nguyên nhân của lỗi này xuất hiện có thể là do đĩa encoder bị một ngoại lực tác động vào gây ra hư hỏng cho đĩa, trong các tài liệu của nhà sản xuất sản phẩm servo có quy định rất rõ về việc hạn chế tối đa việc tác động một lực vào cốt motor để tránh ảnh hưởng phần lớn đến encoder. thường liên quan đến việc hư hỏng như nam châm, nó bị vỡ do tuổi thọ quá cũ hoặc bị tác động một ngoại lực quá lớn. Dây quấn bên trong động cơ cũng có thể bị cháy do gặp tình trạng ngập nước hoặc nặng hơn là bị sét đánh.
Sữa chữa lỗi động cơ servo Fanuc liên quan đến phần mềm => Với các lỗi liên quan đến phần mềm thì có thể kể đến như: Lỗi motor chạy không đúng vị trí, tốc độ có liên quan tới việc cài đặt thông số ảnh hưởng tới hộp số điện tử, hàm scale điện áp tham chiếu điều khiển tốc độ => Khi lỗi này xuất hiện, các bạn nên tham khảo thêm trong phần tài liệu manual của nhà sản xuất để hiểu và cài đặt lại một số thông số động cơ cho đúng với đề xuất theo kỹ thuật.
Trường hợp động cơ motor servo bị hú, rung trong quá trình hoạt động, thì lỗi này có một số nguyênnhân như động cơ công suất thực hiện quá nhỏ, hoặc hệ số của driver được cài đặt chưa chuẩn theo thông số kỹ thuật => Khi gặp lỗi này các bạn nên thực hiện việc lựa chọn auto turning lại cho động
cơ, điều này sẽ giúp các bạn có thể lấy lại thông số tải và giúp phần rất nhiều cho động cơ được hoạt động tốt hơn.
Motor servo gặp phải lỗi vẫn thực hiện quay khi đã chạm ở điểm “zero”, điều này là do driver bị trôi ở offset => Để khắc phục lỗi này một cách triệt để, các bạn cần phải tiến hành cài đặt lại ở điểm offset, khi thực hiện xong sẽ giúp cho động cơ được dừng lại đúng tại thời điểm khi điện áp tham chiếu nằm ở “zero”.
1. Lỗi thấp áp (Undervoltage hoặc LowVoltage).
| Mã Lỗi | Nguyên Nhân | Biện Pháp Khắc Phục |
| AL10: Undervoltage |
|
|
2.Lỗi mã hóa (encoder).
| Mã Lỗi | Nguyên Nhân | Biện Pháp Khắc Phục |
| AL16: Encoder error 1 (At power on) |
|
|
| AL20: Encoder error 2 (during runtime) | ||
| AL23: Encoder error 3 (during runtime) |
3. Lỗi quá tốc độ (Overspeed).
| Mã Lỗi | Nguyên Nhân | Biện Pháp Khắc Phục |
| AL31: Overspeed |
|
|
4. Lỗi quá dòng (Overcurrent).
| Mã Lỗi | Nguyên Nhân | Biện Pháp Khắc Phục |
| AL32: Overcurrent |
|
|
5. Lỗi quá áp (Overvoltage).
| Mã Lỗi | Nguyên Nhân | Biện Pháp Khắc Phục |
| AL33: Overvoltage |
|
|
6. Lỗi quá nhiệt (Overheat).
| Mã Lỗi | Nguyên Nhân | Biện Pháp Khắc Phục |
| AL45: Main circuit device overheat |
|
|
| AL46: Servo motor overheat |
7. Lỗi quá tải (Overload).
| Mã Lỗi | Nguyên Nhân | Biện Pháp Khắc Phục |
| AL50: Overload 1 |
|
|
| AL51: Overload 2 |