Sửa chữa Động cơ Servo Omron R88M-G20030H-S2 Lỗi Liên Quan Encoder – Hướng Dẫn Chi Tiết

Tại sao lỗi Encoder thường xảy ra
Các nguyên nhân phổ biến dẫn đến lỗi encoder của servo Omron, bao gồm:
Đứt cáp hoặc kết nối chân bị lỏng/chập chờn – Tín hiệu encoder bị gián đoạn.
Encoder bị lệch, móp, kẹt cơ học – Do va chạm hoặc lắp đặt không chính xác. Việc tháo/lắp không đúng kỹ thuật dễ gây hư hỏng thêm.
Nhiễu tín hiệu do thiếu dây mass – Nối đất không đầy đủ giữa động cơ và driver làm tín hiệu nhiễu cao, ảnh hưởng bộ phận mạch encoder.
Xâm nhập nước, dầu máy, bụi bẩn, hoặc hóa chất – Dẫn tới hư hại phần cơ bên trong encoder.
Ngoài ra, một số lỗi encoder phát sinh do:
Tuổi thọ thiết bị cao, linh kiện bên trong mòn hoặc hỏng.
Lắp đặt sai chuẩn hoặc thiếu bảo dưỡng định kỳ, khiến sai lệch cơ khí tăng lên theo thời gian.
3. Quy trình kiểm tra và khắc phục lỗi Encoder (≈ 600 từ)
Bước 1: Tháo thiết bị khỏi hệ thống (driver)
Tắt hoàn toàn nguồn trước khi thao tác.
Tháo cáp encoder và dây nguồn để kiểm tra độc lập.
Bước 2: Kiểm tra kết nối cáp
Kiểm tra vị trí nối giữa motor và driver, đảm bảo không có chập chờn hay đứt, chân cắm đúng thứ tự.
Đảm bảo dây mass (đất) đã được nối đúng kỹ thuật và chắc chắn để tránh nhiễu tín hiệu.
Bước 3: Mở nắp encoder – kiểm tra cơ học
Mở nắp và kiểm tra xem encoder có bị lệch, móp, kẹt, hoặc vướng dị vật không. Nếu phát hiện hư hỏng, cân nhắc tháo và lắp lại cẩn thận theo hướng dẫn nhà sản xuất — vì quá trình này đòi hỏi kỹ thuật cao.
Bước 4: Vệ sinh – hút ẩm hoặc sấy nhẹ
Nếu phát hiện có dầu, nước hoặc bụi bẩn, cần làm sạch encoder, có thể dùng máy sấy ở nhiệt độ nhẹ để loại ẩm.
Bước 5: Thử nghiệm lại tín hiệu
Sau xử lý, lắp lại encoder, cấp nguồn và kiểm tra xem lỗi vẫn còn hay không.
Bước 6: Thay thế
Nếu lỗi vẫn tồn tại, cần thay thế bộ encoder mới hoặc cân nhắc thay nguyên motor nếu nặng.
Bước 7: Kiểm tra tải và cân bằng cơ khí (nếu cần)
Gắn lại động cơ vào hệ thống, kiểm tra xem shaft có bị lệch hoặc rung khi có tải không. Điều này ảnh hưởng đến độ chính xác và tuổi thọ encoder.
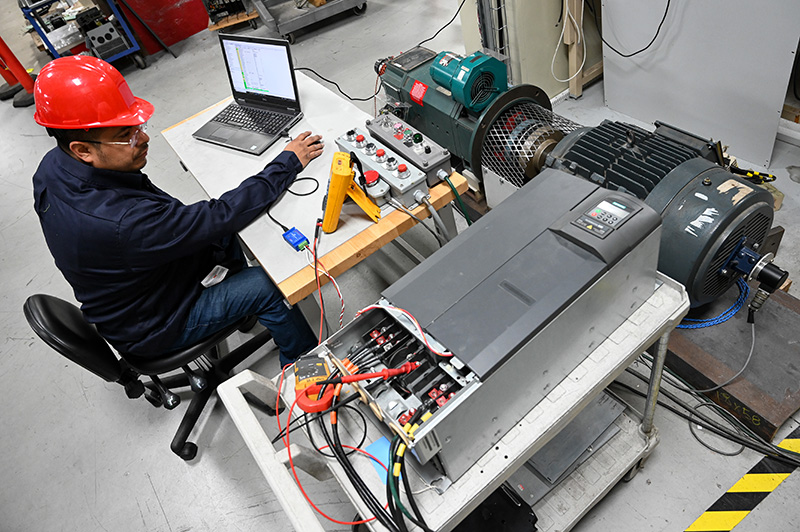
Bước 8: Kiểm tra bằng driver hoặc phần mềm độc lập
Với các dòng servo hiện đại, driver hoặc phần mềm lập trình có thể lưu lịch sử lỗi. Bạn có thể kết nối để xem lỗi chi tiết và phục hồi thông số nếu cần. namphuongviet.vn
4. Một số lưu ý khi thực hiện sửa chữa
Tuân thủ quy trình phòng ngừa an toàn: Yêu cầu kỹ thuật viên phải có trình độ, đạo đức nghề nghiệp và tuân thủ nghiêm túc quy định an toàn điện.
Sử dụng linh kiện chính hãng: Đặc biệt encoder thay thế cần đúng mã, từ nhà phân phối uy tín, tránh loại trôi nổi.
Bảo vệ sau sửa: Phủ keo cách điện, chống bụi ẩm cho bo mạch và khu vực tiếp nối.
Sao lưu tham số (parameters): Nếu motor/driver hỗ trợ, nên backup trước khi sửa để phục hồi nhanh sau này.
Kiểm tra lần cuối: Chạy thử tải thực tế, đảm bảo encoder hoạt động ổn định, không phát sinh lỗi.
Bảo hành và lưu hồ sơ kỹ thuật: Ghi rõ lỗi, biện pháp xử lý và thời gian bảo hành nhằm đảm bảo minh bạch và bảo trì sau này.
5. Ví dụ thực tế (thêm chiều sâu nội dung – ≈ 200 từ; cái gì nên làm/tách sửa)
Ví dụ thực tế: Tại một số trung tâm như Catec Automation (TP HCM và các tỉnh lân cận), họ thường gặp các lỗi encoder như “mất kết nối encoder Err.21/Err.23” do đứt dây hoặc hư motor, và xử lý qua: vệ sinh bo mạch, kiểm tra kết nối, thay linh kiện đúng hãng, test chạy tải, dán tem bảo hành
Các tin khác
- Nhận sửa chữa servo Siemens Giá Rẻ, Uy tín chờ lấy liền, bảo hành dài hạn (20/12/2025, 20:09)
- Sửa Chữa servo Delta Chuyên Nghiệp - Cam Kết Xử Lý Nhanh Ngay Trong Ngày Tại TP HCM - - 121 (20/12/2025, 20:05)
- Chi phí sửa servo INVT báo lỗi - sửa servo INVT giá rẻ lấy trong ngày tại Catec (20/12/2025, 20:00)
- Chi phí sửa servo Xinje báo lỗi - sửa servo Xinje giá rẻ lấy trong ngày tại Catec (20/12/2025, 19:56)
- Nhận sửa chữa servo Xinje Giá Rẻ, Uy tín chờ lấy liền, bảo hành dài hạn (20/12/2025, 19:51)
- Dịch vụ sửa servo Acopos uy tin tiết kiệm chi phí tại CATEC (18/12/2025, 14:27)
- Dịch vụ sửa servo Beckhoff uy tin tiết kiệm chi phí tại CATEC (18/12/2025, 14:20)
- Dịch vụ sửa servo Xinje uy tin tiết kiệm chi phí tại CATEC (18/12/2025, 14:15)
- Dịch vụ sửa servo Teco uy tin tiết kiệm chi phí tại CATEC (18/12/2025, 14:12)
- Dịch vụ sửa servo Schneider uy tin tiết kiệm chi phí tại CATEC (18/12/2025, 09:44)




Đăng ký nhận tin từ
CATEC Technology
Cập nhật thông tin khuyến mãi nhanh nhất
Hưởng quyền lợi giảm giá riêng biệt
Chăm sóc khách hàng
(Tư vấn bán hàng)
(Hỗ trợ kỹ thuật)
Giờ làm việc: 8h - 17h
Kết nối với CATEC Technology



Copyright © 2023 CATEC TECHNOLOGY
CÔNG TY TNHH KỸ THUẬT CÔNG NGHỆ CATEC
-
Địa chỉ151/73/10 Liên Khu 4-5, Phường Bình Tân, Thành Phố Hồ Chí Minh
-
Hotline0913 121 308
-
Emailcatec.tech@gmail.com
