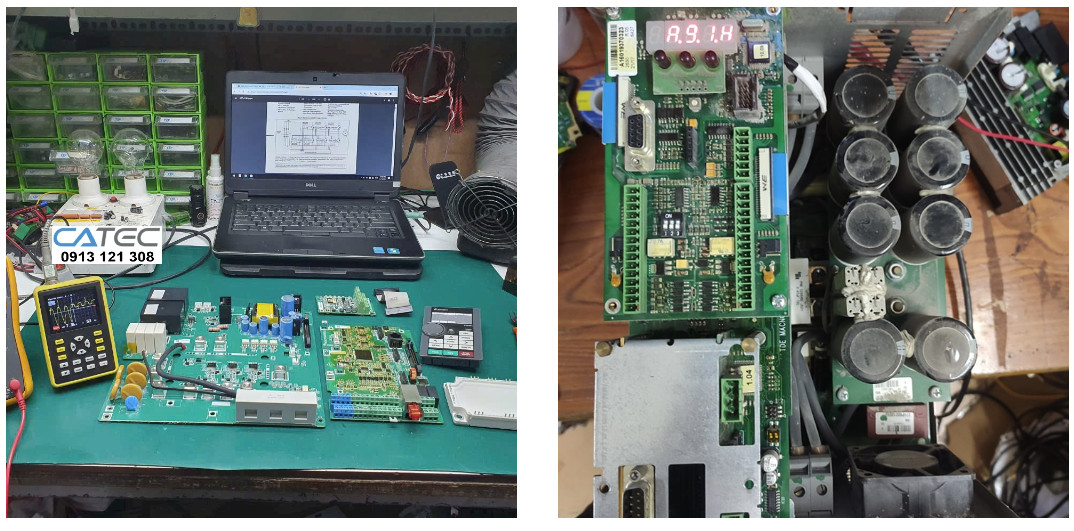







Catec Automation chuyên sửa servo các hãng sau: Servo Yaskawa, Servo Delta, Servo Panasonic, Servo Sanyo Denki,Servo Mitsubishi,ServoTeco, Servo Shihlin, Servo Lyang, Servo Kinco, Servo Siemens, Servo Allen bradley, Servo Omron, Servo Fuji,Servo Lenze, Servo Danfoss, Servo toshiba,Servo packer, servo Vexta, Sửa Servo Fanuc, Servo Emerson.... và Linh kiện sửa chữa có sẵn chẩn đoán lỗi và sửa chữa khắc phục nhanh nhất cho Quý khách hàng. Các trường hợp Servo báo lỗi phổ biến gồm có gồm có Hư hỏng động cơ Servo( hư ổ bi, bạc đạn, Hư Encosder), Hư hỏng Driver( hư board nguồn, Board điều khiển, báo lỗi EProm), dịch vụ sửa servo uy tín, linh kiện chính hãng luôn có sẵn, bảo hành toàn quốc, thời gian xử lý nhanh hạn chế gián đoạn ngừng máy
Chuyên sửa chữa AC servo Panasonic các lỗi như
1. Sửa servo Panasonic Lỗi nổ công suất ngõ ra trên Servo Driver
2. Lỗi quá tải , Lỗi quá Áp , Lỗi quá dòng
3. Sửa servo Lỗi quá nhiệt
4. Lỗi giới hạn dòng điện
5. Sửa servo Panasonic Lỗi Over Speed
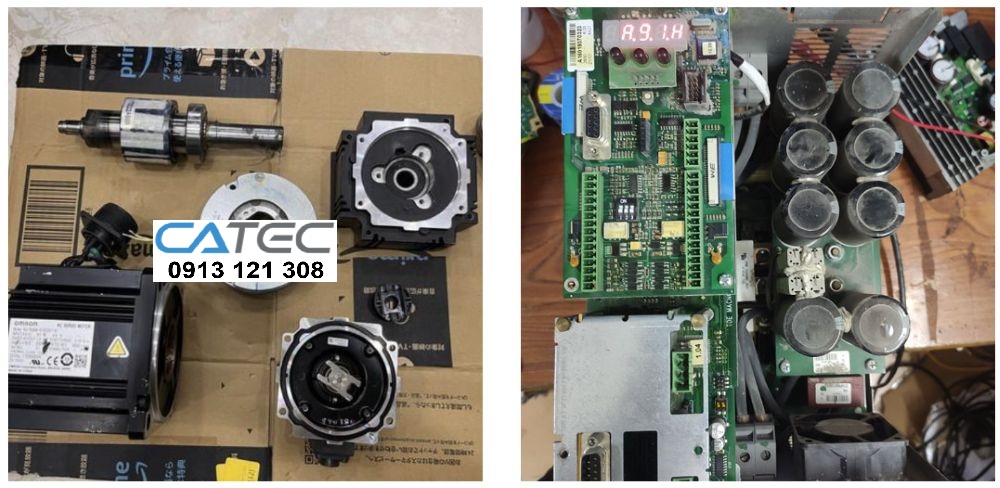
6. Sửa servo Hư encoder , Bể bạc đạn, kẹt Rotor Drive báo lỗi quá dòng/ quá tải
7. Sửa servo Panasonic chạm vỏ: 1/3 pha cuộn dây motor chạm vỏ
8.Sửa servo Panasonic Lỗi mất kết nối Drive servo và Motor Servo
Các dấu hiệu motor servo Panasonic cần sửa chữa
- Motor servo Panasonic hoạt động không ổn định: Motor servo có thể rung lắc, quay không đều hoặc dừng đột ngột.
- Motor servo Panasonic mất lực: Motor servo không thể di chuyển vật thể hoặc di chuyển với lực yếu.
- Motor servo Panasonic phát ra tiếng ồn lớn: Motor servo phát ra tiếng ồn lớn khi hoạt động.
- Motor servo Panasonic bị cháy: Motor servo bị cháy do quá tải hoặc lỗi nguồn

Sửa servo cho máy bắn đinh vít lỗi quá áp ERR12
- sửa chữa servo panasonic cho máy bế tự động đang chạy máy báo lỗi
- sửa chữa servo panasonic cho máy cnc lỗi chạy rung trục
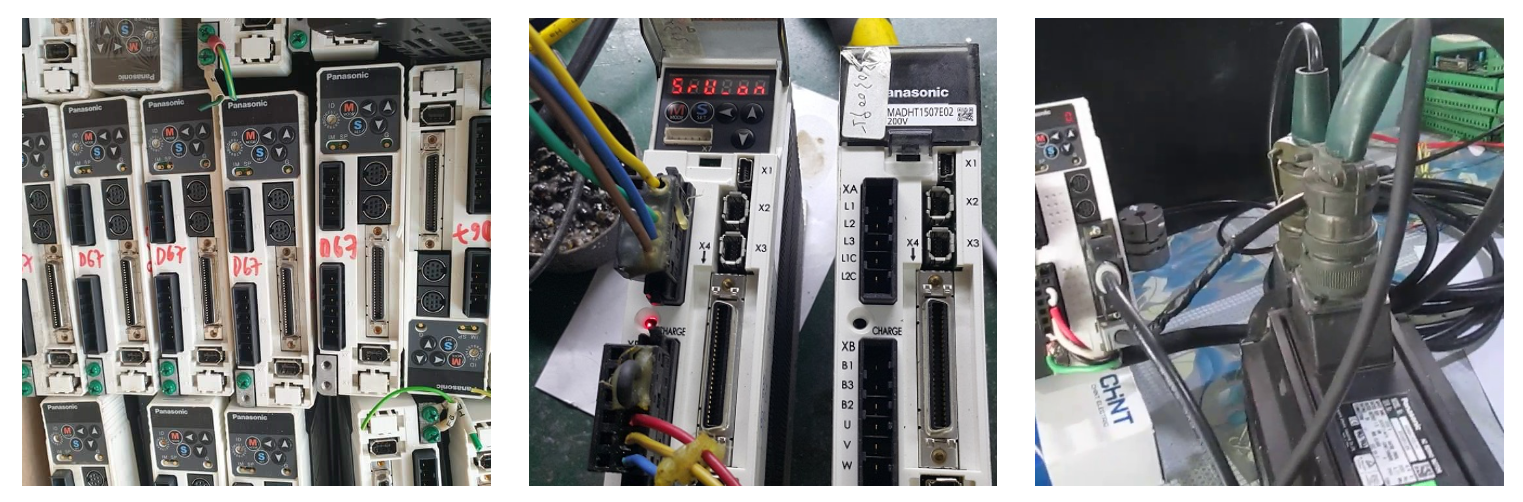
SỬA CHỮA SERVO PANASONIC MINAS A6 MDDLN45SE CHO MÁY CNC
- sửa chữa servo panasonic minas a4 cho máy cắt bao bì lỗi chạy chập chờn
- sửa servo panasonic minas a5 cho máy cắt dây lỗi cấp nguồn màn hình không hiển thị
- sửa chữa servo panasonic cho cánh tay robot lỗi cấp nguồn một lúc lâu sau servo mới lên
- sửa chữa servo panasonic minas a5 cho máy chiết rót lỗi chạy đông cơ rung, lắc
- sửa chữa servo panasonic cho máy đóng gói sản phẩm màn hình báo lỗi ERR21
- sửa chữa servo Panasonic minas a6 cho máy cnc màn hình báo lỗi quá dòng ERR14
- sửa chữa servo panasonic cho máy đóng gói bao bì màn hình báo lỗi ERR16
- Sửa chữa servo panasonic minas a6 cho máy cnc laser cắt sắt màn hình báo lỗi ERR18
- sửa chữa servo panasonic lỗi cấp nguồn vào bị chập nổ cháy mạch
- sửa servo minas a6 cho mát taro bắt đinh vít lỗi màn hình sáng tắt nhấp nháy liên tục
Bảng mã lỗi Servo Panasonic
| Mã lỗi | Mô tả | Nguyên nhân | Giải pháp |
|---|---|---|---|
| 11.0 | Bảo vệ điện áp thấp của nguồn điều khiển | Điện áp giữa P và N của bộ chuyển đổi nguồn điều khiển giảm xuống dưới giá trị quy định. | Tăng dung lượng nguồn điện, thay đổi nguồn điện, kiểm tra và thay thế driver servo nếu cần thiết. |
| 12.0 | Bảo vệ quá áp | Điện áp giữa P và N của bộ chuyển đổi nguồn điều khiển vượt quá giá trị quy định. | Điều chỉnh điện áp đầu vào. Kiểm tra và thay thế điện trở tái tạo ngoài nếu cần thiết. |
| 13.0 | Bảo vệ điện áp thấp của nguồn chính | Sự cố điện tức thời giữa L1 và L3 kéo dài hơn thời gian thiết lập. | Tăng dung lượng nguồn, loại bỏ nguyên nhân gây tắt nguồn chính, thiết lập thời gian dài hơn trong Pr5.09. |
| 14.0 | Bảo vệ quá dòng | Dòng điện qua bộ chuyển đổi vượt quá giá trị quy định. | Kiểm tra và thay thế driver servo, kiểm tra dây động cơ và kết nối đúng cách. |
| 15.0 | Bảo vệ quá nhiệt | Nhiệt độ của thiết bị hoặc bộ phận điện vượt quá giới hạn quy định. | Cải thiện điều kiện làm mát và tăng dung lượng driver và động cơ. |
| 16.0 | Bảo vệ quá tải | Giá trị lệnh mô-men xoắn vượt quá mức quá tải được thiết lập trong Pr5.12. | Tăng dung lượng driver và động cơ. Điều chỉnh lại các thông số. |
| 18.0 | Bảo vệ tải tái tạo quá mức | Năng lượng tái tạo vượt quá khả năng của điện trở tái tạo. | Kiểm tra mẫu chạy và tăng dung lượng driver và động cơ. |
| 18.1 | Bảo vệ lỗi transistor tái tạo | Transistor tái tạo trên driver servo bị lỗi. | Liên hệ VNC Automation. |
| 21.0 | Bảo vệ ngắt kết nối truyền thông encoder | Truyền thông giữa encoder và driver bị gián đoạn. | Kết nối lại dây encoder theo sơ đồ. |
| 23.0 | Bảo vệ lỗi dữ liệu truyền thông encoder | Truyền thông dữ liệu từ encoder gặp lỗi do nhiễu. | Đảm bảo nguồn cấp cho encoder, tách riêng dây encoder và dây động cơ, kết nối màn chắn với FG. |
| 24.0 | Bảo vệ lệch vị trí | Xung lệch vượt quá giá trị thiết lập trong Pr0.14. | Kiểm tra lệnh vị trí và điều chỉnh lại gain. |
| 25.0 | Bảo vệ lệch vị trí hybrid | Vị trí tải bằng thang đo ngoài và vị trí động cơ bằng encoder lệch nhau vượt quá số xung thiết lập trong Pr3.28. | Kiểm tra kết nối giữa động cơ và tải, giữa thang đo ngoài và driver. Điều chỉnh các giá trị thiết lập. |
| 26.0 | Bảo vệ quá tốc độ | Tốc độ quay của động cơ vượt quá giá trị thiết lập trong Pr5.13. | Không ra lệnh tốc độ quá mức và điều chỉnh lại gain. |
| 27.0 | Bảo vệ lỗi tần số xung lệnh | Tần số xung lệnh vượt quá 1.2 lần giá trị thiết lập trong Pr5.32. | Kiểm tra tần số xung lệnh đầu vào. |
| 28.0 | Bảo vệ giới hạn phát xung | Tần số đầu ra của xung tái tạo vượt quá giới hạn. | Kiểm tra các giá trị thiết lập của Pr0.11 và 5.03. |
| 29.0 | Bảo vệ tràn bộ đếm lệch | Giá trị lệch vị trí của xung encoder vượt quá 230-1. | Kiểm tra lệnh vị trí và điều chỉnh gain. |
| 31.0 | Bảo vệ lỗi chức năng an toàn | Chức năng an toàn phát hiện lỗi. | Liên hệ VNC Automation. |
| 33.0 | Bảo vệ lỗi chồng chéo gán I/F | Tín hiệu đầu vào SI1-SI5 được gán với hai chức năng. | Gán đúng chức năng cho từng chân đầu nối. |
| 34.0 | Bảo vệ lỗi thiết lập phạm vi làm việc của động cơ | Động cơ vượt quá phạm vi làm việc được thiết lập trong Pr5.14. | Kiểm tra gain và tỷ lệ quán tính. Tăng giá trị thiết lập của Pr5.14. |
| 36.0 | Bảo vệ lỗi tham số EEPROM | Dữ liệu trong vùng lưu trữ tham số bị hỏng khi đọc từ EEPROM lúc bật nguồn. | Thiết lập lại tất cả các tham số. Nếu lỗi tiếp diễn, Liên hệ VNC Automation. |
| 37.0 | Bảo vệ lỗi mã kiểm tra EEPROM | Dữ liệu xác nhận ghi vào EEPROM bị hỏng khi đọc từ EEPROM lúc bật nguồn. | Liên hệ VNC Automation. |
| 38.0 | Bảo vệ lỗi đầu vào cấm lái | Cả đầu vào cấm lái hướng dương và âm đều bật. | Kiểm tra công tắc và dây nối liên quan đến đầu vào cấm lái. |
| 39.0 | Bảo vệ quá mức đầu vào analog 1 | Điện áp vượt quá giá trị thiết lập trong Pr4.24 được áp dụng cho đầu vào analog 1. | Thiết lập lại đúng giá trị trong Pr4.24 và kiểm tra kết nối. |
| 39.1 | Bảo vệ quá mức đầu vào analog 2 | Điện áp vượt quá giá trị thiết lập trong Pr4.27 được áp dụng cho đầu vào analog 2. | Thiết lập lại đúng giá trị trong Pr4.27 và kiểm tra kết nối. |
| 39.2 | Bảo vệ quá mức đầu vào analog 3 | Điện áp vượt quá giá trị thiết lập trong Pr4.30 được áp dụng cho đầu vào analog 3. | Thiết lập lại đúng giá trị trong Pr4.30 và kiểm tra kết nối. |
| 40.0 | Bảo vệ lỗi hệ thống tuyệt đối | Nguồn điện và pin cho encoder tuyệt đối bị tắt và điện áp tụ điện giảm xuống dưới giá trị quy định. | Kết nối lại nguồn pin và xóa lỗi encoder tuyệt đối. |
| 41.0 | Bảo vệ lỗi bộ đếm tuyệt đối | Bộ đếm nhiều vòng của encoder tuyệt đối vượt quá giá trị quy định. | Giới hạn phạm vi di chuyển trong 32767 vòng. |
| 42.0 | Bảo vệ lỗi quá tốc độ tuyệt đối | Tốc độ quay của động cơ vượt quá giá trị quy định khi sử dụng encoder tuyệt đối. | Kiểm tra nguồn cấp và kết nối của encoder. |
| 43.0 | Bảo vệ lỗi khởi tạo encoder | Lỗi được phát hiện khi khởi tạo encoder gia tăng nối tiếp. | Liên hệ VNC Automation. |
| 44.0 | Bảo vệ lỗi bộ đếm vòng đơn | Lỗi được phát hiện trong giá trị bộ đếm vòng đơn của encoder tuyệt đối. | Liên hệ VNC Automation. |
| 45.0 | Bảo vệ lỗi bộ đếm nhiều vòng | Lỗi được phát hiện trong giá trị bộ đếm nhiều vòng của encoder tuyệt đối. | Liên hệ VNC Automation. |
| 47.0 | Bảo vệ lỗi trạng thái tuyệt đối | Lỗi được phát hiện khi bật nguồn với encoder tuyệt đối. | Sắp xếp để động cơ không quay khi bật nguồn. |
| 48.0 | Bảo vệ lỗi pha Z của encoder gia tăng | Mất xung pha Z của encoder gia tăng nối tiếp. | Liên hệ VNC Automation. |
| 49.0 | Bảo vệ lỗi tín hiệu CS của encoder gia tăng | Lỗi logic tín hiệu CS của encoder gia tăng nối tiếp. | Liên hệ VNC Automation. |
| 50.0 | Bảo vệ lỗi dây nối thang đo ngoài | Truyền thông giữa thang đo ngoài và driver bị gián đoạn. | Kết nối lại dây thang đo ngoài theo sơ đồ. |
| 51.0 | Bảo vệ lỗi trạng thái 0 của thang đo ngoài | Bit 0 của mã lỗi thang đo ngoài (ALMC) bật. | Kiểm tra nguyên nhân và xóa lỗi từ bảng điều khiển. |
| 51.1 | Bảo vệ lỗi trạng thái 1 của thang đo ngoài | Bit 1 của mã lỗi thang đo ngoài (ALMC) bật. | Kiểm tra nguyên nhân và xóa lỗi từ bảng điều khiển. |
| 51.2 | Bảo vệ lỗi trạng thái 2 của thang đo ngoài | Bit 2 của mã lỗi thang đo ngoài (ALMC) bật. | Kiểm tra nguyên nhân và xóa lỗi từ bảng điều khiển. |
| 51.3 | Bảo vệ lỗi trạng thái 3 của thang đo ngoài | Bit 3 của mã lỗi thang đo ngoài (ALMC) bật. | Kiểm tra nguyên nhân và xóa lỗi từ bảng điều khiển. |
| 51.4 | Bảo vệ lỗi trạng thái 4 của thang đo ngoài | Bit 4 của mã lỗi thang đo ngoài (ALMC) bật. | Kiểm tra nguyên nhân và xóa lỗi từ bảng điều khiển. |
| 51.5 | Bảo vệ lỗi trạng thái 5 của thang đo ngoài | Bit 5 của mã lỗi thang đo ngoài (ALMC) bật. | Kiểm tra nguyên nhân và xóa lỗi từ bảng điều khiển. |